前段时间参加了一个表盘指针读数的比赛,今天来总结一下
数据集一共有一千张图片:
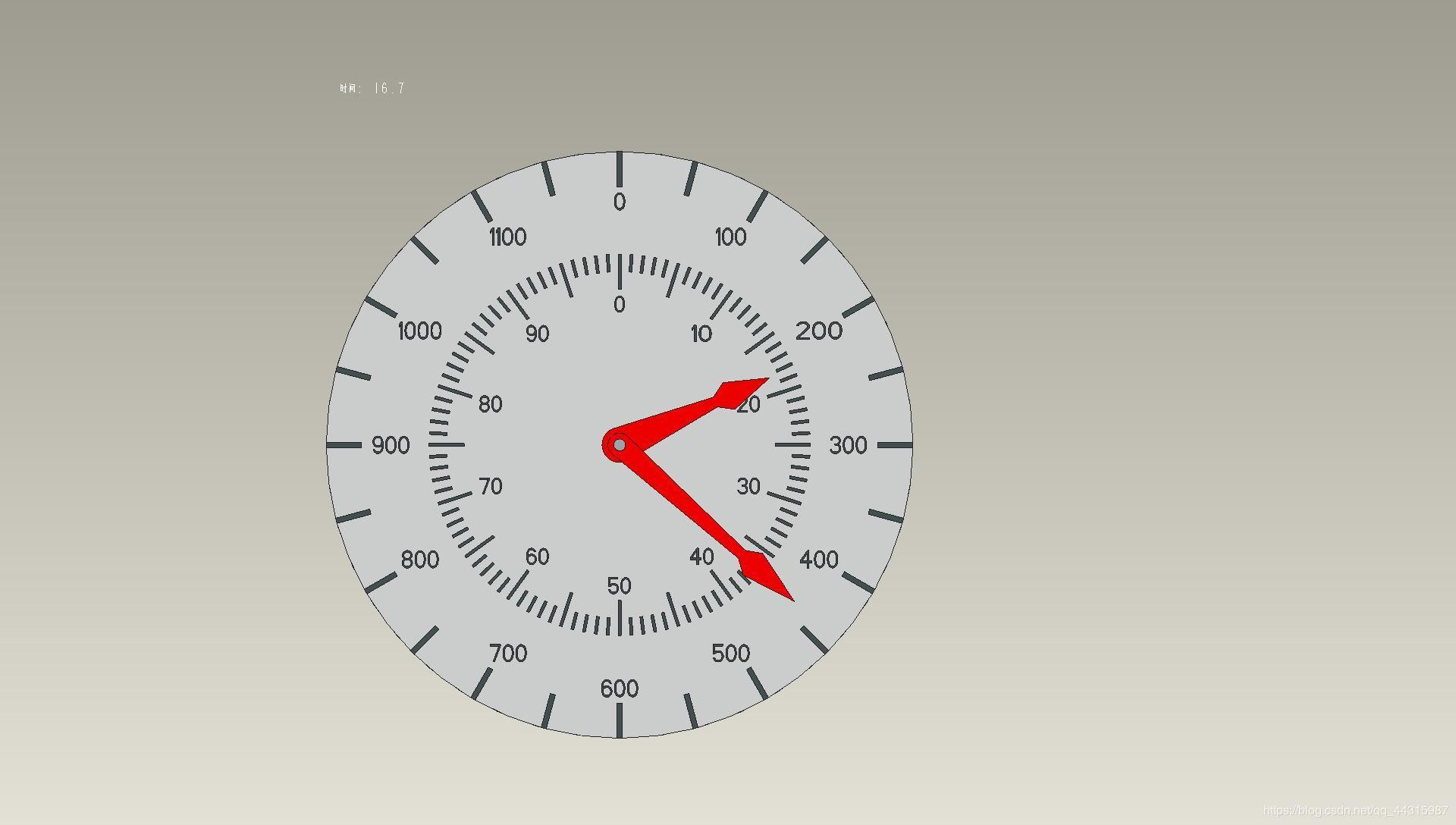
方法一:径向灰度求和
基本原理:
将图像以表盘圆心转换成极坐标,然后通过矩阵按行求和找到二值图最大值即为指针尖端
导入需要用到的包
import cv2 as cv import numpy as np import math from matplotlib import pyplot as plt import os图像预处理
去除背景:利用提取红色实现
def extract_red(image): """ 通过红色过滤提取出指针 """ red_lower1 = np.array([0, 43, 46]) red_upper1 = np.array([10, 255, 255]) red_lower2 = np.array([156, 43, 46]) red_upper2 = np.array([180, 255, 255]) dst = cv.cvtColor(image, cv.COLOR_BGR2HSV) mask1 = cv.inRange(dst, lowerb=red_lower1, upperb=red_upper1) mask2 = cv.inRange(dst, lowerb=red_lower2, upperb=red_upper2) mask = cv.add(mask1, mask2) return mask
获得钟表中心:轮廓查找,取出轮廓的外接矩形,根据矩形面积找出圆心
def get_center(image): """ 获取钟表中心 """ edg_output = cv.Canny(image, 100, 150, 2) # canny算子提取边缘 cv.imshow('dsd', edg_output) # 获取图片轮廓 contours, hireachy = cv.findContours(edg_output, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) center = [] cut=[0, 0] for i, contour in enumerate(contours): x, y, w, h = cv.boundingRect(contour) # 外接矩形 area = w * h # 面积 if area < 100 or area > 4000: continue cv.rectangle(image, (x, y), (x + w, y + h), (255, 0, 0), 1) cx = w / 2 cy = h / 2 cv.circle(image, (np.int(x + cx), np.int(y + cy)), 1, (255, 0, 0)) ## 在图上标出圆心 center = [np.int(x + cx), np.int(y + cy)] break return center[::-1]
由上面的图像可以看出,圆心定位还是非常准确的
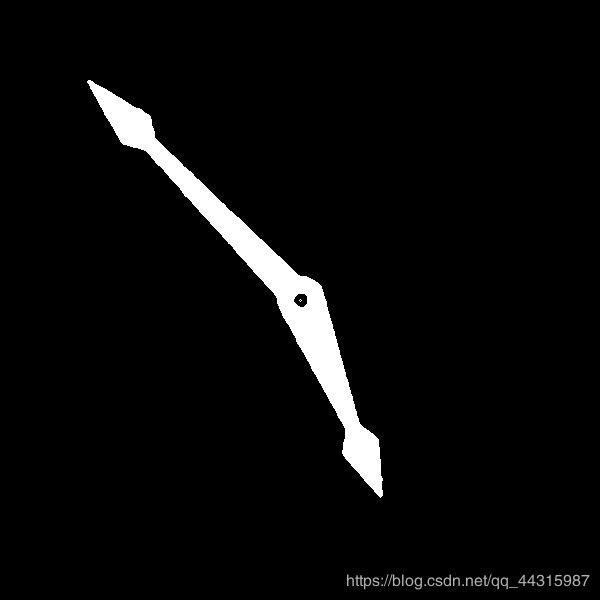
图片裁剪
def ChangeImage(image): """ 图像裁剪 """ # 指针提取 mask = extract_red(image) mask = cv.medianBlur(mask,ksize=5)#去噪 # 获取中心 center = get_center(mask) # 去除多余黑色边框 [y, x] = center cut = mask[y-300:y+300, x-300:x+300] # 因为mask处理后已经是二值图像,故不用转化为灰度图像 return cut剪裁后的图像如下图所示:
极坐标转换
注意:需要将图片裁剪成正方形
def polar(image): """ 转换成极坐标 """ x, y = 300, 300 maxRadius = 300*math.sqrt(2) linear_polar = cv.linearPolar(image, (y, x), maxRadius, cv.WARP_FILL_OUTLIERS + cv.INTER_LINEAR) mypolar = linear_polar.copy() #将图片调整为从0度开始 mypolar[:150, :] = linear_polar[450:, :] mypolar[150:, :] = linear_polar[:450, :] cv.imshow("linear_polar", linear_polar) cv.imshow("mypolar", mypolar) return mypolar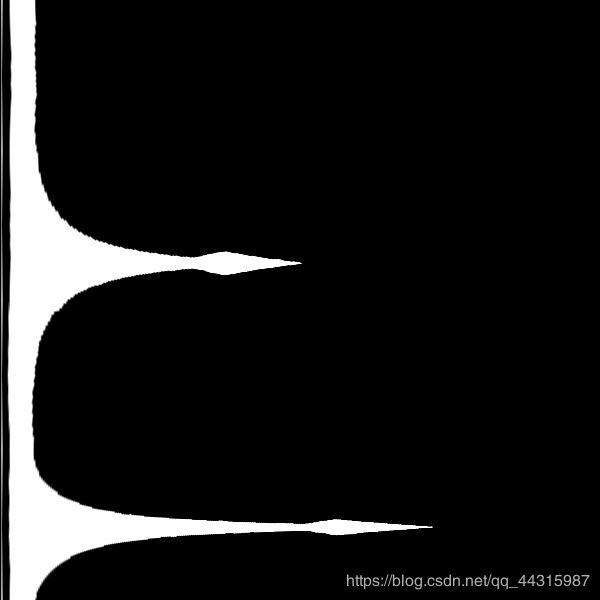
由图像就可以很容易发现指针的顶点
计算角度
def Get_Reading(sumdata): """ 读数并输出 """ peak = [] # s记录遍历时波是否在上升 s = sumdata[0] < sumdata[1] for i in range(599): # 上升阶段 if s==True and sumdata[i] > sumdata[i+1] and sumdata[i] > 70000: peak.append(sumdata[i]) s=False # 下降阶段 if s==False and sumdata[i] < sumdata[i+1]: s=True peak.sort() a = sumdata[0] b = sumdata[-1] if not peak or max(a,b) > peak[-1]: peak.append(max(a,b)) longindex = (sumdata.index(peak[-1]))%599 longnum = (longindex + 1)//25*50 # 先初始化和长的同一刻度 #shortindex = longindex shortnum = round(longindex / 6) try: shortindex = sumdata.index(peak[-2]) shortnum = round(shortindex / 6) except IndexError: i=0 while i<300: i += 1 l = sumdata[(longindex-i)%600] r = sumdata[(longindex+i)%600] possibleshort = max(l,r) # 在短指针可能范围内寻找插值符合条件的值 if possibleshort > 80000: continue elif possibleshort < 60000: break else: if abs(l-r) > 17800: shortindex = sumdata.index(possibleshort) - 1 shortnum = round(shortindex / 6) break return [longnum,shortnum%100]def test(): """ RGS法测试 """ image = cv.imread("./BONC/1_{0:0>4d}".format(400) + ".jpg") newimg = ChangeImage(image) polarimg = polar(newimg) psum = polarimg.sum(axis=1, dtype = 'int32') result = Get_Reading(list(psum)) print(result)if __name__ == "__main__": test() k = cv.waitKey(0) if k == 27: cv.destroyAllWindows() elif k == ord('s'): cv.imwrite('new.jpg', src) cv.destroyAllWindows()[1050, 44]
方法二:Hough直线检测
原理:利用Hough变换检测出指针的两条边,从而两条边的中线角度即为指针刻度
数据预处理与上面的方法类似
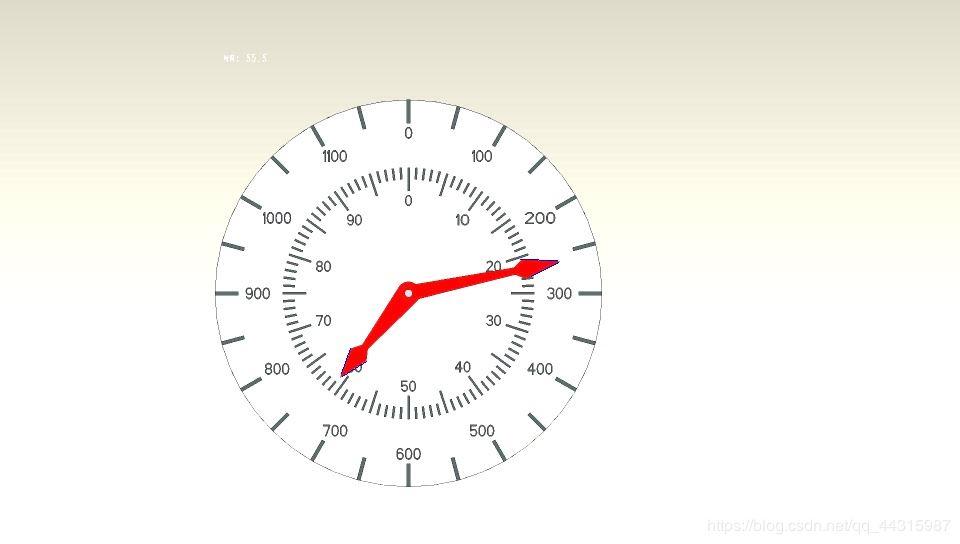
可以看到分别检测出了两个指针的左右两条边,然后可以由这四个角度算出两个指针中线的角度,具体计算过程写的有点复杂
class Apparatus: def __init__(self, name): self.name = name self.angle = [] self.src = cv.imread(name) def line_detect_possible_demo(self, image, center, tg): ''' :param image: 二值图 :param center: 圆心 :param tg: 直线检测maxLineGap ''' res = {} # 存放线段的斜率和信息 edges = cv.Canny(image, 50, 150, apertureSize=7) cv.imshow("abcdefg", edges) lines = cv.HoughLinesP(edges, 1, np.pi/360, 13, minLineLength=20, maxLineGap=tg) for line in lines: x_1, y_1, x_2, y_2 = line[0] # 将坐标原点移动到圆心 x1 = x_1 - center[0] y1 = center[1] - y_1 x2 = x_2 - center[0] y2 = center[1] - y_2 # 计算斜率 if x2 - x1 == 0: k = float('inf') else: k = (y2-y1)/(x2-x1) d1 = np.sqrt(max(abs(x2), abs(x1)) ** 2 + (max(abs(y2), abs(y1))) ** 2) # 线段长度 d2 = np.sqrt(min(abs(x2), abs(x1)) ** 2 + (min(abs(y2), abs(y1))) ** 2) # 将长指针与短指针做标记 if d1 < 155 and d1 > 148 and d2 > 115: res[k] = [1] elif d1 < 110 and d1 > 100 and d2 > 75: res[k] = [2] else: continue res[k].append(1) if (x2 + x1) /2 > 0 else res[k].append(0) # 将14象限与23象限分离 cv.line(self.src, (x1 + center[0], center[1] - y1), (x2 + center[0], center[1] - y2), (255, 0, 0), 1) cv.imshow("line_detect-posssible_demo", self.src) # 计算线段中点的梯度来判断是指针的左侧线段还是右侧线段 middle_x = int((x_1 + x_2) / 2) middle_y = int((y_1 + y_2) / 2) grad_mat = image[middle_y-5:middle_y+6, middle_x-5:middle_x+6] cv.imshow("grad_mat", grad_mat) grad_x = cv.Sobel(grad_mat, cv.CV_32F, 1, 0) grad_y = cv.Sobel(grad_mat, cv.CV_32F, 0, 1) gradx = np.max(grad_x) if np.max(grad_x) != 0 else np.min(grad_x) grady = np.max(grad_y) if np.max(grad_y) != 0 else np.min(grad_y) if ((gradx >=0 and grady >= 0) or (gradx <= 0 and grady >= 0)) and res[k][1] == 1: res[k].append(1) # 右测 elif ((gradx <= 0 and grady <= 0) or (gradx >= 0 and grady <= 0)) and res[k][1] == 0: res[k].append(1) else: res[k].append(0) # 左侧 # 计算角度 angle1 = [i for i in res if res[i][0] == 1] angle2 = [i for i in res if res[i][0] == 2] # 长指针 a = np.arctan(angle1[0]) b = np.arctan(angle1[1]) if a * b < 0 and max(abs(a), abs(b)) > np.pi / 4: if a + b < 0: self.angle.append(math.degrees(-(a + b) / 2)) if res[angle1[1]][1] == 1 else self.angle.append( math.degrees(-(a + b) / 2) + 180) else: self.angle.append(math.degrees(np.pi - (a + b) / 2)) if res[angle1[1]][1] == 1 else self.angle.append( math.degrees(np.pi - (a + b) / 2) + 180) else: self.angle.append(math.degrees(np.pi / 2 - (a + b) / 2)) if res[angle1[1]][1] == 1 else self.angle.append(math.degrees(np.pi / 2 - (a + b) / 2) + 180) print('长指针读数:%f' % self.angle[0]) # 短指针 a = np.arctan(angle2[0]) b = np.arctan(angle2[1]) if a * b < 0 and max(abs(a), abs(b)) > np.pi / 4: if a + b < 0: self.angle.append(math.degrees(-(a + b) / 2)) if res[angle2[1]][1] == 1 else self.angle.append( math.degrees(-(a + b) / 2) + 180) else: self.angle.append(math.degrees(np.pi - (a + b) / 2)) if res[angle2[1]][1] == 1 else self.angle.append( math.degrees(np.pi - (a + b) / 2) + 180) else: self.angle.append(math.degrees(np.pi / 2 - (a + b) / 2)) if res[angle2[1]][1] == 1 else self.angle.append(math.degrees(np.pi / 2 - (a + b) / 2) + 180) print('短指针读数:%f' % self.angle[1]) def get_center(self, mask): edg_output = cv.Canny(mask, 66, 150, 2) cv.imshow('edg', edg_output) # 外接矩形 contours, hireachy = cv.findContours(edg_output, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) center = [] for i, contour in enumerate(contours): x, y, w, h = cv.boundingRect(contour) # 外接矩形 area = w * h # 面积 if area > 1000 or area < 40: continue #print(area) # cv.circle(src, (np.int(cx), np.int(cy)), 3, (255), -1) cv.rectangle(self.src, (x, y), (x + w, y + h), (255, 0, 0), 1) cx = w / 2 cy = h / 2 cv.circle(self.src, (np.int(x + cx), np.int(y + cy)), 1, (255, 0, 0)) center.extend([np.int(x + cx), np.int(y + cy)]) break cv.imshow('center', self.src) return center def extract(self, image): red_lower1 = np.array([0, 43, 46]) red_lower2 = np.array([156, 43, 46]) red_upper1 = np.array([10, 255, 255]) red_upper2 = np.array([180, 255, 255]) frame = cv.cvtColor(image, cv.COLOR_BGR2HSV) mask1 = cv.inRange(frame, lowerb=red_lower1, upperb=red_upper1) mask2 = cv.inRange(frame, lowerb=red_lower2, upperb=red_upper2) mask = cv.add(mask1, mask2) mask = cv.bitwise_not(mask) cv.imshow('mask', mask) return mask def test(self): self.src = cv.resize(self.src, dsize=None, fx=0.5, fy=0.5) # 此处可以修改插值方式interpolation mask = self.extract(self.src) mask = cv.medianBlur(mask, ksize=5) # 去噪 # 获取中心 center = self.get_center(mask) # 去除多余黑色边框 [y, x] = center mask = mask[x - 155:x + 155, y - 155:y + 155] cv.imshow('mask', mask) #self.find_short(center, mask) try: self.line_detect_possible_demo(mask, center, 20) except IndexError: try: self.src = cv.imread(self.name) self.src = cv.resize(self.src, dsize=None, fx=0.5, fy=0.5) # 此处可以修改插值方式interpolation self.src = cv.convertScaleAbs(self.src, alpha=1.4, beta=0) blur = cv.pyrMeanShiftFiltering(self.src, 10, 17) mask = self.extract(blur) self.line_detect_possible_demo(mask, center, 20) except IndexError: self.src = cv.imread(self.name) self.src = cv.resize(self.src, dsize=None, fx=0.5, fy=0.5) # 此处可以修改插值方式interpolation self.src = cv.normalize(self.src, dst=None, alpha=200, beta=10, norm_type=cv.NORM_MINMAX) blur = cv.pyrMeanShiftFiltering(self.src, 10, 17) mask = self.extract(blur) self.line_detect_possible_demo(mask, center, 20) if __name__ == '__main__': apparatus = Apparatus('./BONC/1_0555.jpg') # 读取图片 apparatus.test() k = cv.waitKey(0) if k == 27: cv.destroyAllWindows() elif k == ord('s'): cv.imwrite('new.jpg', apparatus.src) cv.destroyAllWindows()长指针读数:77.070291
短指针读数:218.896747由结果可以看出精确度还是挺高的,但是这种方法有三个缺点:
- 当两个指针重合时候不太好处理
- 有时候hough直线检测只能检测出箭头的一条边,这时候就会报错,可以利用图像增强、角点检测和图像梯度来辅助解决,但是效果都不太好
- 计算角度很复杂!!(也可能是我想复杂了,不过这段代码确实花了大量时间)
代码里可能还有很多问题,希望大家多多指出
到此这篇关于OpenCV 表盘指针自动读数的示例代码的文章就介绍到这了,更多相关OpenCV 表盘自动读数内容请搜索python博客以前的文章或继续浏览下面的相关文章希望大家以后多多支持python博客!
-
<< 上一篇 下一篇 >>
标签:numpy matplotlib
OpenCV 表盘指针自动读数的示例代码
看: 1557次 时间:2020-07-22 分类 : python教程
- 相关文章
- 2021-12-20Python 实现图片色彩转换案例
- 2021-12-20python初学定义函数
- 2021-12-20图文详解Python如何导入自己编写的py文件
- 2021-12-20python二分法查找实例代码
- 2021-12-20Pyinstaller打包工具的使用以及避坑
- 2021-12-20Facebook开源一站式服务python时序利器Kats详解
- 2021-12-20pyCaret效率倍增开源低代码的python机器学习工具
- 2021-12-20python机器学习使数据更鲜活的可视化工具Pandas_Alive
- 2021-12-20python读写文件with open的介绍
- 2021-12-20Python生成任意波形并存为txt的实现
-
搜索
-
-
推荐资源
-
Powered By python教程网 鲁ICP备18013710号
python博客 - 小白学python最友好的网站!